Can the Five-in-One Multi-Functional Coating Robot Scale Fast in Southeast Asia?
Over the past year, a notable signal has emerged across Southeast Asia’s construction equipment procurement circles: search volume for the “five-in-one multi-functional coating robot” has been climbing steadily. From industrial plant expansions in Vietnam, to building sites at Indonesia’s new capital IKN, to Singapore’s SGD 47 billion infrastructure super-cycle, contractors are showing more interest in this equipment category than ever before.
However, search heat does not equal market readiness. The concept of construction coating automation has been around for years. Why is it drawing concentrated attention specifically in 2026? And has the maturation of core technologies—especially mapless autonomous navigation—really advanced enough to let such machines scale quickly across Southeast Asia’s fragmented job sites?Our assessment is positive. The preconditions for market entry are largely in place. That said, the speed of adoption depends on how three key variables align. Below is a step-by-step breakdown.
The Hidden Costs of Fragmented Workflows Are Eroding Contractor Margins
To answer “can it scale,” we must first ask “why is it needed.”
Southeast Asia’s construction market is in a phase of structural expansion. Vietnam saw nearly VND 800 trillion in FDI inflows in 2025. Indonesia has allocated IDR 488 trillion for its IKN new capital development. Singapore’s infrastructure demand is forecast to reach SGD 47 billion. Multiple countries are pushing large-scale industrial, infrastructure, and commercial projects simultaneously. Yet contractors face a structural paradox: deadlines are tightening while the supply of skilled labor cannot keep pace.Against this backdrop, the traditional wall-finishing workflow—spray putty, scrape flat, sand or topcoat, using three machines, three crews, and three rounds of site coordination—looks increasingly cumbersome.The waste generated by this model operates on three levels.
First, space occupancy. Three standalone machines consume three times the floor area. On high-density urban plots in Ho Chi Minh City, compact downtown sites in Singapore, or limited-access corridors within Indonesia’s IKN core, footprint is a systematically underestimated cost. What is less visible but equally damaging is the micro-loss from equipment changeovers. Every swap in and out of the work zone bleeds minutes from the schedule, and those minutes compound into the “schedule overrun” that surfaces at project closeout.
Second, labor coordination friction. Wait time between operations, communication overhead, and idle hours caused by upstream delays never appear in the bid, yet they show up on the payroll every month. Industry estimates put effective labor losses from poor process handoffs at 15% to 22%. In practical terms, you pay for a full crew and receive roughly eighty cents of productive output.
Third, quality convergence is difficult. Different equipment, different operators, and different time windows produce natural variation in visual and physical finish. For foreign-invested clients, that variance translates directly into rework risk and warranty exposure.When these three cost layers stack onto already-thin project margins, the economic case for replacing a process chain with a single machine becomes unavoidable. Demand-side certainty supplies the first affirmative condition for rapid scale.
Product Engineering Maturity Has Crossed the Commercial Threshold
Demand alone does not mean the product is ready. The second decisive variable is engineering reliability.Looking at production units already on the market, each machine undergoes a rigid six-stage manufacturing protocol before leaving the factory: incoming inspection, material allocation, assembly, calibration, endurance testing, and dispatch. Every batch of aluminum alloy, structural steel, and stainless steel is verified at intake. Six major subsystems—chassis, control, lift, robotic arm, spray module, and robot assembly—are integrated using a modular approach, with traceable tolerances logged at every interface.
The core of calibration is the joint tuning of a six-axis force sensor and a high-precision vision system. During operation, the force sensor continuously senses contact force between the tool and the wall surface, dynamically adjusting scraping or sanding pressure in real time. The resulting specification is: ±1N force control accuracy, 0.1 mm positioning precision, and scraping flatness within 0.5 mm. In plain terms, every wall and ceiling receives a consistent finish, unaffected by operator skill gaps or fatigue accumulated over a long shift.
In terms of field efficiency, this class of equipment delivers putty spraying and scraping at 120 m²/h, latex paint spraying at 450 m²/h, and sanding at 80 m²/h. Combined coating costs drop to roughly one-third of conventional methods. Each figure maps to a fundamentally different physical process: spraying depends on fluid control and atomization, scraping on force control and path planning, sanding on consistent cont
act force and consumable management. Maintaining all three at high output on one platform demands deep synergy among mechanical design, control algorithms, and process parameters. That is what separates true five-in-one integration from simple feature bundling. Tool changeover between operations stays under five minutes, allowing a single unit to cycle through multiple tasks in one workday.
Design details engineered for jobsite reality matter just as much. A large-capacity lithium iron phosphate battery pack was chosen over higher-energy-density ternary lithium specifically for thermal stability in hot, humid conditions. The IP54 enclosure rating is the minimum viable protection for dusty, wet construction environments. The 70-liter hopper cuts refill interruptions, while the automatic backflow
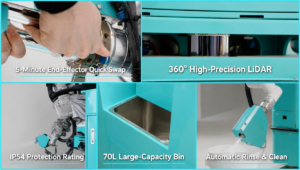
cleaning system shrinks end-of-shift cleanup from hours to minutes. The cumulative effect of these optimizations points to one operational goal: continuous, unattended runtime.From an engineering maturity standpoint, the product has cleared the threshold for commercial deployment.
Mapless Autonomous Navigation: The Key to Non-Standardized Job Sites
Meeting product specs is a necessary but not sufficient condition. The technology variable that truly dictates scaling speed is whether the robot can adapt to Southeast Asia’s highly fragmented job site environments.
The Achilles’ heel of legacy construction robots is the “survey first, work later” paradigm. Technicians must pre-map the environment and program paths ahead of time. In theory this ensures accuracy; in practice, the site changes daily. New scaffolding goes up, materials get moved, structural modifications alter the space. A static map decays almost as fast as it is built. This approach—forcing the job site to adapt to the robot—fundamentally conflicts with the non-standardized nature of construction.
Next-generation systems take a fundamentally different route. Upon startup, the robot builds a 3D scene model on the fly, recognizing walls, ceilings, beams, columns, and door and window openings in real time. It then auto-matches process parameters and plans an optimal tool path. No human setup. No CAD imports. No surveyor on standby.
Under the hood, this capability rests on multi-modal sensor fusion—360° LiDAR, depth cameras, and inertial measurement units—combined with SLAM algorithms for pose estimation and map updating. Some advanced systems already support fused inputs from BIM models, point clouds, and AI vision, allowing the robot not only to perceive the site but also to cross-reference it against the design model and lock onto preci
se construction boundaries.
This capability pays especially high dividends in Southeast Asian scenarios: narrow corridors and legacy piping in aging industrial parks, logistics-constrained greenfield sites for new capital districts, and daily-changing conditions in commercial renovation projects. The common thread across all of them is that standardized pre-conditions do not exist, and pre-modeling is neither economical nor reliable. Mapless navigation lets a general operator get productive after short training, without dependence on scarce surveying technicians. That dramatically lowers the barrier to technology adoption.In other words, the biggest historical obstacle to construction robot adoption in emerging markets—insufficient localized technical support—is now being dissolved by the technology itself. Product environmental adaptability supplies the second affirmative condition for rapid scale.
Real-Project Validation: From a China Reference to Southeast Asian Applicability
Demand is clear, the product is mature, and the technology is adapted. Yet the final leap from “technically feasible” to “commercially deployable” can only be cleared on an actual project.The new campus construction of Nanjing Normal University High School in Jiangbei New District offers a telling reference. The project involved large-scale interior wall finishing across newly built school facilities, with demanding re
quirements for surface consistency and delivery schedule. The contractor deployed a fourth-generation multi-functional coating robot, which executed putty spraying, scraping, and sanding as one continuous workflow. Operators never had to switch equipment or crews between stages; a single machine handled substrate treatment through final surface refinement from start to finish.
Three key takeaways emerge from this case. First, it validates technical feasibility of “one machine, many processes” on a genuine public-building project. School architecture is inherently heterogeneous—classrooms, corridors, stairwells, and multi-purpose halls all present different spatial geometries, and construction windows are tightly bound to the academic calendar. The robot’s ability to perform multiple processes in such an environment demonstrates that its spatial perception and path-planning capabilities are robust enough for non-standard building layouts.
Second, it shows the operational simplification that process integration delivers. Under conventional practice, three separate crews stage in sequentially, triggering three rounds of site coordination and three parallel equipment-management tracks. On this project, the entire chain collapsed into a single continuous workflow. Site logistics complexity dropped significantly, and reliance on scarce skilled labor was materially reduced.
Third, and most importantly, public educational facilities carry stricter bidding protocols, quality acceptance criteria, and audit compliance than commercial projects. A construction robot that can clear these hurdles and deliver is, by definition, a credible production tool—not a concept, not a pilot, but a proven piece of equipment.
Nanjing proved that the technology works. But Southeast Asian contractors want to know: can this be replicated under high-heat, high-humidity, high-dust conditions? The answer is yes. The mapless navigation, multi-process integration, and continuous operation validated in Nanjing are precisely the core technical assets needed to tackle fragmented job sites across Southeast Asia. The underlying technology has proven its portability.
Conclusion: The Three Conditions Are Met. Now the Market Needs Connectors.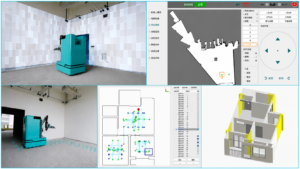
Taken together, the three core preconditions for rapid scaling of the five-in-one multi-functional coating robot in Southeast Asia—demand pull, engineering maturity, and environmental adaptability—are all largely satisfied. That does not mean adoption will happen automatically. Scaling speed ultimately depends on last-mile execution across the value chain.Equipment suppliers need to build credible local service networks. In Southeast Asia’s decision chain, questions like “Are spare parts available locally?”, “Is the response time measured in hours or days?”, and “Is training delivered in English or the local language?” often carry more weight than technical specs.
Contractors, for their part, need to shift their decision mindset. Moving from “buying equipment” to “buying an automated construction solution” means evaluating not just unit price but total cost of operation, effective labor hour extension, and rework rate reduction. The opportunity for distributors is clear. Construction robots in Southeast Asia are still in the market introduction phase. Whoever builds localized service capability first has a shot at becoming the category definer for the region. This is not simple trade brokering; it demands a combination of technical support, after-sales responsiveness, and training delivery.
We specialize in trading construction robots across Southeast Asia and global markets, having supplied equipment, technical consultation, and localized support for multiple overseas projects. Whether you are a project manager or contractor seeking automated coating solutions, or a distributor interested in representing this product category in your territory, we welcome you to reach out for a market-specific deployment assessment.
Previous Singapore construction demand forecast 2026: Automation and PSG Grants
Singapore construction demand forecast 2026: Automation and PSG Grants
Singapore construction demand forecast 2026: Automation and PSG GrantsNext Which Construction Robots Are Most Useful for Southeast Asian Projects During the Rainy Season?
Which Construction Robots Are Most Useful for Southeast Asian Projects During the Rainy Season?
Which Construction Robots Are Most Useful for Southeast Asian Projects During the Rainy Season?